Article
citation information:
Cybulska-Gac,
K., Krasuski, K., Ciećko, A. Accuracy analysis of Galileo code
positioning for UAV. Scientific Journal
of Silesian University of Technology. Series Transport. 2025, 127, 39-55. ISSN: 0209-3324. DOI: https://doi.org/10.20858/sjsutst.2025.127.3
Klaudia CYBULSKA-GAC[1], Kamil KRASUSKI[2], Adam CIEĆKO[3]
ACCURACY ANALYSIS
OF GALILEO CODE POSITIONING FOR UAV
Summary. Official ICAO
certification for the Galileo satellite navigation system is currently being
implemented for aeronautical applications. Hence, experimental studies are
needed to verify the performance of Galileo for kinematic positioning of the
user in aviation. The main objective of this work is to present an optimal
computational strategy for determining the user's position and the accuracy
parameter of Galileo positioning in civil aviation. The paper uses the least
squares method and Kalman filtering to calculate the user position. The
calculations were performed in two independent Galileo observation processing
software, i.e., RTKLIB and Emlid Studio. Galileo
navigation and observation data acquired from a DJI Matrice RTK300 unmanned
platform was used in the calculations. The Galileo SPP code method algorithm
was used to determine the UAV coordinates. The RTKLIB application uses a
solution based on the least squares method model to determine user coordinates
using the SPP method. The Emlid Studio application,
respectively, is based on the Kalman filtering algorithm. On this basis, the
UAV positions were determined for the two computational strategies, and the
Galileo positioning accuracy was then determined in the form of position errors
and RMS errors. The study shows that Emlid Studio
software improves Galileo's kinematic positioning accuracy by between 15 and
65% over the results obtained from the RTKLIB solution. The flight tests
carried out, the software used, and the computational strategies can be utilized
for other global GNSS systems.
Keywords: Galileo, SPP method, accuracy, position errors, UAV
1. INTRODUCTION
In air transport, Global Navigation Satellite
Systems (GNSS) are mainly used to determine the position of an aircraft or
unmanned aerial vehicle [1]. Therefore, the operation and performance of GNSS
systems in aviation bring many benefits that have a significant impact on
improving the user's positioning quality parameters [2]. In order to utilize
the functionality of GNSS in aviation, they are subject to strict certification
requirements, which are contained in Annex 10 of the Chicago Convention on International
Civil Aviation – 'Aeronautical Telecommunications' [3]. Certified GNSS systems
are intended to meet the criteria of accuracy, continuity, integrity, and
availability [2]. However, at the moment, Annex 10 mainly describes
certification for only two global systems, GPS (Global Positioning System) and
GLONASS (Globalnaya Navigacionaya
Sputnikovaya Sistema) [3]. Moreover, certification
requirements for the European Navigation Satellite System (Galileo) are being
implemented. The official certification of the Galileo system in aviation
raises the question of the need to test positioning quality parameters and, in
particular, the accuracy of Galileo's positioning for the use of its
functionality in aviation applications. Galileo, unlike GPS and GLONASS, will
only have civilian use, including in the area of air transport [4-6].
Furthermore, it is anticipated that there will be a surge of interest in the
use of Galileo in aviation after 2020 [7].
2. RELATED
WORKS
The
literature review on the application of Galileo in air transport is quite
diverse. Worth mentioning is the work on the integration of Galileo and EGNOS
(European Geostationary Navigation Overlay Service) data for single- and
dual-frequency GNSS positioning [8, 9] and including approach and landing
procedures in research [10]. In terms of landing and approach procedures,
research in the development of a GBAS (Ground-Based Augmentation System) based
on the Galileo navigation system is worth highlighting. This area includes
research into the use of Galileo in combination with both GBAS and SBAS
(Satellite-Based Augmentation System) augmentation systems should be mentioned
[11]. Furthermore, of interest in this field is the research shown in paper
[12], where the results of the Galileo positioning quality within the SoL (Safety of Life) positioning service are demonstrated.
Next, paper [13] presents the concept of operation of a Ground-Based Regional
Augmentation System (GRAS) using the Galileo navigation system. On the other
hand, [14] describes the results of a study on the determination of HPL
(Horizontal Protection Level)/VPL (Vertical Protection Level) protection levels
for a GBAS augmentation system with Galileo and GPS solutions. Another subject
area is the kinematic positioning of Galileo during flight test. Thus, a paper
[15] describes the first flight test, during which the position of an aircraft
was determined from the Galileo solution within the OS (Open Service)
positioning service. Another paper [16] shows a simulation study of the
determination of ionospheric scintillations occurring along an aircraft flight
path. GPS, GLONASS, Galileo and BeiDou (BeiDou Navigation Satellite System)
observations were used in the study, and the calculation additionally
determined GNSS satellite positioning quality parameters according to ICAO
(International Civil Aviation Organization) requirements. The next paper [17]
presents the possibility of using Galileo, GPS, GLONASS and BeiDou data to
monitor navigation parameters and aircraft trajectories. Publication [18]
presents the results of Galileo kinematic positioning during a mobile flight
test. In particular, the parameters shown are: signal-to-noise ratio SNR
(Signal Noise to Ratio), geometric coefficients DOP (Dilution of Precision),
number of Galileo satellites tracked, standard deviations and position errors.
Publication [19] is an extension of the work [18] and additionally contains the
results of aircraft position determination based on a multi-frequency Galileo
solution. Furthermore, paper [20] compares the results of Galileo and GPS
kinematic positioning accuracy during a flight test. The achieved GPS
positioning accuracy was higher than the Galileo positioning accuracy. A very
interesting study was shown in paper [21], which used an Orolia GNSS simulator
to determine the position of an aircraft. The study simulated the effect of
jamming on multisystem GPS+Galileo+GLONASS
positioning and determined the accuracy parameters. In the studies of Galileo
positioning in aviation, it is also important to develop RAIM (Receiver
Autonomous Integrity Monitoring) algorithms for the control of navigation
calculations and the elimination of coarse errors. Thus, in the studies
[22-26], research was carried out on determination of availability within the
RAIM module for the LPV-200 procedure using a multisystem GPS+GLONASS+Galileo
solution, application of RAIM simulation algorithms within the CAT-III approach
procedure using GNSS/Galileo navigation systems, application of ARAIM (Advances
RAIM) algorithms for the determination of the predicted position of an aircraft
using GPS/GLONASS/Galileo constellations, development of coarse error detection
algorithms based on statistical tests and taking into account
GPS/GLONASS/Galileo/BeiDou observations, application of RAIM algorithms for GPS+Galileo positioning in the GNSS Non-Precision Approach
(NPA) procedure. The use of Galileo in aviation is also the subject of
implementation and validation of GNSS receivers. Thus, in this case, it is
worth mentioning research on: E1 Galileo signal strength for OS/SoL positioning services [27], validation of ICAO
certification requirements for single- and dual-frequency GPS and Galileo
receivers [28], development of a dual-frequency Galileo receiver architecture
for aeronautical applications [29], development of algorithms for integrating
GPS and Galileo signals into a GNSS receiver [30, 31]. For Galileo satellite
receivers used in aviation, it is also worth noting the possibility of using
the E5 frequency. For example, paper [32] shows the architecture of a Galileo
receiver with the possibility of receiving the E5 signal for aviation purposes.
On the other hand, papers [33-35] describe the interoperability and
compatibility of E5 (Galileo) and L5 (GPS) signals in civil aviation. In the
area of air transport, Galileo can be used for air traffic control and
management, as shown in [36]. In addition, Galileo has a SAR (Search and
Rescue) service, which is of considerable importance for improving the safety
of flight operations [37-38]. Galileo will not only have its uses for aircraft,
but also for UAV (Unmanned Aerial Vehicle) technology. It is possible to talk
about the use of Galileo for UAVs in the areas of photogrammetric and
geoinformation studies [39], the development of RNP (Required Navigation
Performance) specifications for UAVs [40], the use of UAVs in the operation of
the Galileo OS positioning service [41], the use of UAVs equipped with a
Galileo receiver to measure and test mobile networks [42], the use of UAVs
equipped with a Galileo receiver to collect data on electricity distribution
networks [43].
On
the basis of the literature reviewed, and the state-of-the-art analysis carried
out; it can be concluded that:
- the problem of determining the accuracy parameter is
important for Galileo to meet ICAO certification requirements,
- the accuracy of Galileo kinematic positioning was mainly
determined using code observations on E1 or E5 frequencies,
- the number of flight tests and flight trials performed
was not very extensive from the point of view of Galileo kinematic positioning,
- Galileo will be used in aviation to improve the quality
of GNSS positioning and the implementation of approach and landing procedures,
- an important element of research is the interoperability
and compatibility of Galileo with other global GNSS systems,
- in-flight research using Galileo should be developed for
both aircraft and UAVs.
3. RESEARCH
PROBLEM
As
the state-of-the-art analysis has shown, more ongoing research is needed on the
application and implementation of the Galileo navigation system in precision
GNSS positioning for aeronautical applications. This concerns both the
kinematic positioning aspect of Galileo for aircraft and unmanned aircraft.
Hence, it is necessary to first carry out experimental flight tests using the
Galileo solution, then use appropriate software to develop Galileo kinematic
observations, then select a suitable computational strategy, and finally
determine the user position. The user position coordinates obtained will
further allow the determination of the Galileo kinematic positioning accuracy,
which is crucial from the point of view of the certification of the Galileo system
according to ICAO standards. Without further flight tests, it will be difficult
to estimate the acceptable tolerance level of accuracy according to ICAO
requirements.
Thus,
this paper proposes the implementation and validation of two computational
strategies for determining the accuracy of Galileo's kinematic positioning.
Namely, on the one hand, a least-squares method algorithm was used and, on the
other hand, Kalman filtering was used to determine user coordinates using SPP
(Single Point Positioning) [44]. Coordinate calculations were carried out in
RTKLIB and Emlid Studio software. The determined
coordinates were compared with the reference trajectory of the flight
calculated using the PPK (Post Processing Kinematic) method, which allowed an
accuracy analysis to be carried out. At this stage, position errors and mean
squared errors were calculated as accuracy measures. Accuracy measures were
determined for the calculated coordinates from the two calculation strategies.
This will make it possible to determine which computational strategy is better
for Galileo kinematic positioning in aeronautical applications.
The
article is structured into 6 main sections (1. Introduction, 2. Related works,
3. Research problem, 4. Research method and materials, 5. Research results and
discussion, 6. Conclusions), and a literature list is added at the end.
4. RESEARCH
METHOD AND MATERIALS
The research methodology was divided into
several main stages, i.e.:
- Stage I concerns the execution of the test
flight, recording Galileo navigation and observation data with a given time
interval,
- Stage II concerns the processing of Galileo
kinematic observations in a given software using a given computational
strategy,
- Stage III concerns the determination of the
accuracy parameter in the form of position errors and mean squared errors.
Figure 1 shows a block diagram for the
presented test methodology.
Fig. 1. The
flowchart of research method
In Stage I of the research methodology, the
most important element was the execution of the aerial experiment. For this
purpose, the DJI Matrice RTK300 unmanned platform [45] was used, which has a
built-in GNSS receiver with the option to track and record Galileo observations
and ephemeris data. As part of the experimental study, 2 test flights were
carried out in Olsztyn in October 2021 and March 2022, respectively. The first
flight lasted more than 20 minutes, while the second flight lasted about 15
minutes, respectively. Figures 2 and 3 show the horizontal and vertical
trajectory of the UAV flight during experiment 1. During the flight performed,
the B-coordinate of the UAV varied from 53.7465150° to 53.7532620°, while the
L-coordinate varied from 20.4530280° to 20.4622110°. The ellipsoidal altitude of the UAV flight
ranged from 138,275 m to 277,166 m. In addition, Figure 4 shows the number of
Galileo satellites tracked during the flight. The number of satellites ranged
from 6 to 8 during flight 1. In turn, Figures 5 and 6 show the horizontal and
vertical trajectory of the UAV flight during experiment 2. During this flight,
the B coordinate of the UAV ranged from 53.7498530° to 53.7516180°. The L coordinate
reached values from 20.4502370° to 20.4623430°. The ellipsoidal altitude of the UAV flight
ranged from 246.155 m to 288.416 m. Additionally, Figure 7 shows the number of
Galileo satellites tracked during this flight. The number of satellites ranged
from 5 to 6 during flight 2. It can be deduced that during flight 1, the GNSS
receiver on the unmanned platform tracked more Galileo satellites than during
flight 2.
In Stage II of the research methodology, the
recorded observations and Galileo ephemeris data were processed in RTKLIB
v.2.4.3 [46] and Emlid Studio v.1.7 [47] software.
For this purpose, the SPP code method algorithm was used to determine the UAV
coordinates. In RTKLIB, a computational strategy based on the least squares
method algorithm [48] is used to determine the coordinates, while in Emlid Studio, respectively, we have a Kalman filter
implemented [49]. In both programs, the resulting coordinates of the user's
position are stored using BLh ellipsoidal
coordinates. The scheme of the applied computational strategies in both
programs is shown in Table 1.
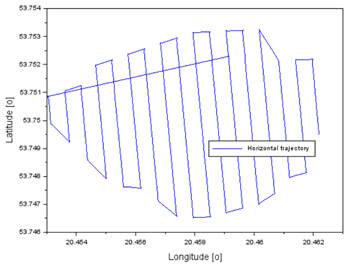
Fig. 2. The
horizontal trajectory during flight test 1
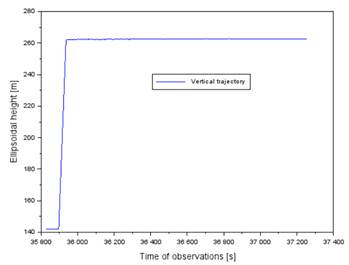
Fig. 3. The
vertical trajectory during flight test 1
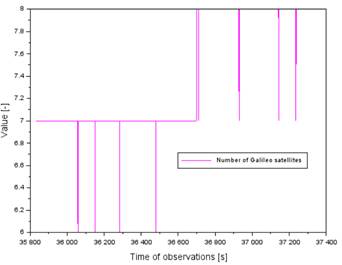
Fig. 4. Number of
Galileo satellites during flight test 1
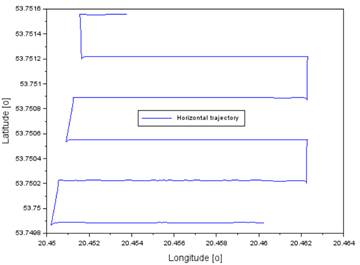
Fig. 5. The
horizontal trajectory during flight test 2
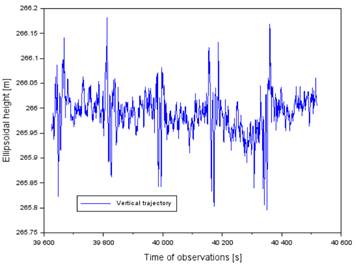
Fig. 6. The
vertical trajectory during flight test 2
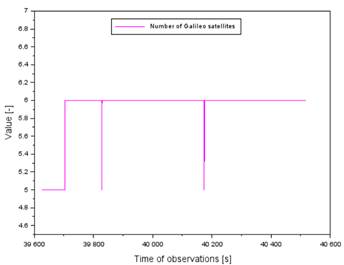
Fig. 7. Number of
Galileo satellites during flight test 2
Tab. 1
The comparison of computing
strategies in RTKLIB and Emlid Studio software
|
Parameter |
RTKLIB software |
Emlid
Studio software |
|
Positioning mode |
SPP method |
SPP method |
|
Source of broadcast data |
Galileo navigation message |
Galileo navigation message |
|
Source of observation data |
Galileo code observations on E1
frequency |
Galileo code observations on E1
frequency |
|
Cut-off elevation |
50 |
50 |
|
Model of orbit |
Based on Galileo navigation
message |
Based on Galileo navigation
message |
|
Model of satellite bias
correction |
Based on Galileo navigation
message |
Based on Galileo navigation
message |
|
Model of ionosphere correction |
Based on Galileo navigation
message |
Based on Galileo navigation
message |
|
Model of troposphere correction |
Saastamoinen model |
Saastamoinen model |
|
Interval of computation |
1 s |
1 s |
|
Computing strategy |
Least Square estimation |
Kalman filter |
|
Output coordinates |
Ellipsoidal coordinates BLh (B-Latitude, L- Longitude, h- ellipsoidal height) |
Ellipsoidal coordinates BLh (B-Latitude, L- Longitude, h- ellipsoidal height) |
|
GNSS system |
Galileo |
Galileo |
Stage III of the research methodology
involved an analysis of the accuracy of the computed UAV coordinates. For this
purpose, position errors were first calculated for BLh
ellipsoidal coordinates as [50]:
 (1)
(1)
where:
![]() – position errors,
– position errors,
![]() – UAV coordinates determined from the Galileo
SPP solution in the RTKLIB and Emlid Studio applications,
– UAV coordinates determined from the Galileo
SPP solution in the RTKLIB and Emlid Studio applications,
![]() – flight reference position calculated in
Topcon MAGNET Tools v.6.1.2.0 software [51].
– flight reference position calculated in
Topcon MAGNET Tools v.6.1.2.0 software [51].
Root mean square
(RMS) errors were then calculated as [52]:
 (2)
(2)
where:
![]() – RMS error to
determine the accuracy of the determination of the B coordinate,
– RMS error to
determine the accuracy of the determination of the B coordinate,
![]() – RMS error to
determine the accuracy of the determination of the L coordinate,
– RMS error to
determine the accuracy of the determination of the L coordinate,
![]() – RMS error to
determine the accuracy of the determination of the h coordinate,
– RMS error to
determine the accuracy of the determination of the h coordinate,
![]() – number of measurement epochs.
– number of measurement epochs.
Stage III is carried out in the Scilab v.6.1.1 environment [53], in which a numerical
script with computational commands was developed and written to carry out the
accuracy analysis. In addition, graphical function commands were developed and
written in the script to create Figures 2-13.
5. RESEARCH
RESULTS AND DISCUSSION
Section 5 presents an analysis of the Galileo
kinematic positioning accuracy for the UAV platform and a discussion on the
results. Figures 8 and 9 show the position errors for the B- coordinate during
flight 1 and flight 2. In flight 1, the position errors from the RTKLIB
solution ranged from -5.7 m to 10.8 m, while those from Emlid
Studio ranged from 0.4 m to 1.9 m, respectively. In flight 2, position errors
from the RTKLIB solution ranged from -8.4 m to 9.2 m, while in Emlid Studio they ranged from -1.4 m to 4.7 m,
respectively. From the RTKLIB solution, frequent spikes in position error
values can be seen due to the changing number of Galileo satellites being
tracked. The results from Emlid Studio, on the other
hand, are smoothed by applying Kalman filtering. In addition, the Klaman
filtering suppressed the random errors present in the RTKLIB solution quite
significantly.
Figures 10 and 11 show the results of the
position errors for the L coordinate for both flights. In flight 1, the
position errors from the RTKLIB solution ranged from -2.3 m to 5.1 m, while in Emlid Studio they ranged from 0.7 m to 1.5 m, respectively.
In flight 2, position errors from the RTKLIB solution ranged from -0.6 m to 3.2
m, while in Emlid Studio they ranged from -4.9 m to
2.6 m, respectively. It is worth noting on the example of flight 2 and the Emlid Studio solution that the low number of Galileo
satellites results in a deterioration of kinematic positioning accuracy. In
addition, sudden changes in the number of Galileo satellites tracked can also
result in degradation of kinematic positioning accuracy (see measurement
epochs: 40164 s to 40166 s).
Figures 12 and 13 visualize the position
errors obtained for the h coordinate during flights 1 and 2. In flight 1, the
position errors from the RTKLIB solution ranged from -12.8 m to 14.8 m, while
in Emlid Studio they ranged from -4.1 m to -0.4 m,
respectively. In flight 2, position errors from the RTKLIB solution ranged from
-19.8 m to 22.4 m, while in Emlid Studio they ranged
from -9.3 m to 7.3 m, respectively. Out of all coordinates, the worst
positioning accuracy occurred for the ellipsoidal height h. As with the
horizontal B and L coordinates, the accuracy of the vertical component h is
affected by the number of Galileo satellites being tracked. It is worth noting
that the particularly low accuracy of the determination of the vertical
coordinate h is evident from the RTKLIB solution, which is based on the use of
the least squares method algorithm in the stochastic process of processing
Galileo observations. To summarize the position error results obtained, the
adoption of an appropriate computational strategy quite significantly affects
the accuracy of Galileo kinematic positioning for the UAV platform. In
addition, the changing number of Galileo satellites being tracked also affects
the estimation of the accuracy parameter.
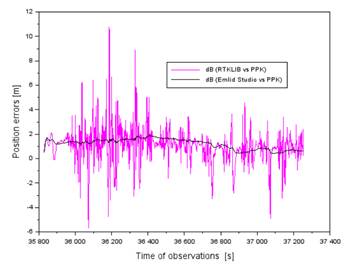
Fig. 8. Position
errors of B coordinate during flight test 1
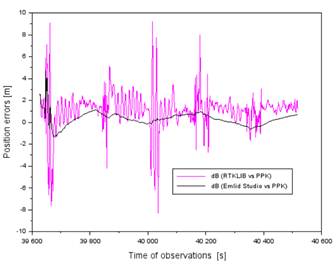
Fig. 9. Position
errors of B coordinate during flight test 2
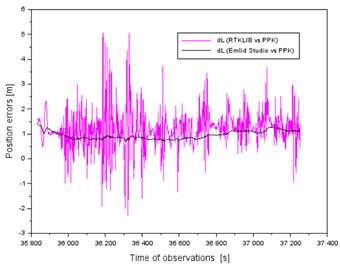
Fig. 10. Position
errors of L coordinate during flight test 1
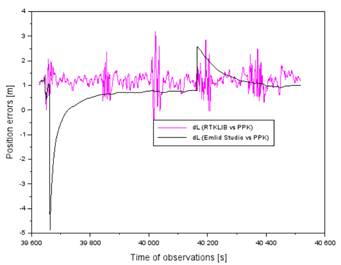
Fig. 11. Position
errors of L coordinate during flight test 2
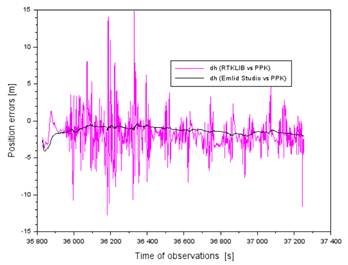
Fig. 12. Position
errors of h coordinate during flight test 1
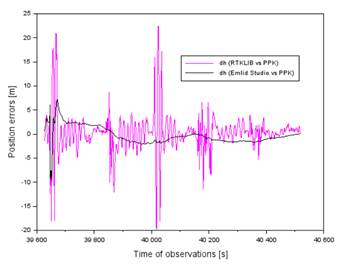
Fig. 13. Position
errors of h coordinate during flight test 2
The second part of the discussion of the test results
obtained concerns the comparison of the RMS errors. Table 2 summaries the
calculated RMS errors for all BLh coordinates for
both tests. Thus, the RMS errors from the RTKLIB solution ranged from 1.3 m to
4.1 m for all BLh components for both tests.
Correspondingly, from the Emlid Studio solution, they
ranged from 0.7 m to 1.8 m. Successively for the individual BLh
coordinates, higher Galileo positioning accuracy was obtained from the Emlid Studio solution compared to RTKLIB by respectively:
- 28% to 65% for the B coordinate,
- 15% to 29% for the L coordinate,
- 50% to 56% for the h coordinate.
Thus, the effectiveness of the Emlid Studio solution was confirmed for Galileo kinematic
positioning.
Tab.
2
The comparison of obtained RMS
errors
|
RMS Parameter |
Flight no. 1 |
Flight no. 2 |
|
|
1.8 m for RTKLIB solution, 1.3 m for Emlid
Studio solution |
2.0 m for RTKLIB solution, 0.7 m for Emlid
Studio solution |
|
|
1.4 m for RTKLIB solution, 1.0 m for Emlid
Studio solution |
1.3 m for RTKLIB solution, 1.1 m for Emlid
Studio solution |
|
|
3.0 m for RTKLIB solution, 1.5 m for Emlid
Studio solution |
4.1 m for RTKLIB solution, 1.8 m for Emlid
Studio solution |
The final research topic of section 5
concerns the comparison of the obtained research results in relation to the
analysis of the state of the art and the published scientific literature.
Comparing the results of Galileo kinematic positioning accuracy with the
literature on the subject, it can be said that:
- the study used Galileo code observations at
E1 frequency similarly to the articles [18-21, 27-28],
- the research used a UAV platform similarly to
the articles [39-43],
- higher or similar positioning accuracy was
obtained in the calculations as in papers [16, 18-21],
- the study demonstrated and applied the SPP
code positioning algorithm similarly to the papers [18-21].
6. CONCLUSIONS
This paper shows the results of a study on determining
the accuracy of Galileo kinematic positioning. Accuracy as one of the four
quality parameters of GNSS satellite positioning is crucial for horizontal and
vertical navigation. Hence, flight tests as well as the study and analysis of
this parameter according to ICAO requirements for the Galileo navigation system
are necessary. This paper presents two main computational strategies for
determining accuracy. Namely, the first used RTKLIB and the least squares
method to determine position coordinates. The second, on the other hand, used
Klaman filtering in Emlid Studio. Galileo navigation and code observation data
acquired from a DJI Matrice RTK300 unmanned platform were used in the
calculations. The resulting coordinates from both solutions were compared with
the reference trajectory of the flight so that the Galileo positioning accuracy
could be determined. In the accuracy analysis, the position errors and RMS
errors were determined. The RMS errors of the RTKLIB solution ranged from 1.3 m
to 4.1 m, while those of the Emlid Studio solution ranged from 0.7 m to 1.8 m.
In addition, the study shows that Emlid Studio improves Galileo's kinematic
positioning accuracy by 15 to 65% over the results obtained with the RTKLIB
solution. Further flight tests are planned in the near future, in which the
accuracy parameter for the Galileo navigation system will be further
investigated.
References
1.
Grzegorzewski M., W. Jaruszewski, A. Fellner, S.
Oszczak, A. Wasilewski, Z. Rzepecka, J. Kapcia, T. Popławski. 1999. “Preliminary results of DGPS/DGLONASS aircraft
positioning in flight approaches and landings”. Annual of Navigation 1: 41-53.
2.
Mrozik M.
2023. „Application of the SBAS positioning method in the
aircraft approach procedure”. PhD thesis. Silesian
University of Technology, Gliwice.
3.
International
Civil Aviation Organization. 2006. ICAO Standards and Recommended Practices
(SARPS), Annex 10, Volume I (Radio Navigation Aids). Available at:
http://www.ulc.gov.pl/pl/prawo/prawomi%C4%99dzynarodowe/206-konwencje.
4.
GPS
Official Website. “GALILEO System Update”. Available at:
https://www.gps.gov/cgsic/international/2002/brussels/berkes.pdf.
5.
van Dam R.D. 1999. “Legal Panel GNSS and Aviation”. Proceedings of the 12th International Technical Meeting of the Satellite
Division of The Institute of Navigation (ION GPS 1999). Nashville, TN, September 1999. P. 975-982.
6.
Vejrazka F. 2007. “Galileo and the Other Satellite Navigation
Systems”. Proceedings of the 2007 17th International Conference
Radioelektronika, Brno, Czech Republic, 2007. P. 1-4. DOI:
10.1109/RADIOELEK.2007.371446.
7.
ESA
Website. “Galileo to augment systems guiding aircraft in 2020”. Available at:
https://www.esa.int/Applications/Navigation/Galileo_to_augment_systems_guiding_aircraft_in_2020.
8.
EGNOS
User Support Website. “New achievement for Galileo and civil aviation”.
Available at: https://egnos-user-support.essp-sas.eu/news-events/news/new-achievement-galileo-and-civil-aviation.
9.
Collins
Aerospace Website. “Multi-Mode Global Positioning System and Galileo (MUGG)
Project”. Available at:
https://www.collinsaerospace.com/what-we-do/industries/commercial-aviation/flight-deck/navigation-and-guidance/gps-devices/glu-2100/multi-mode-global-positioning-system-and-galileo-mugg-project.
10.
Murcia J., L. Chocano, P. Haro, R. Farnworth, H. de With.
2010. “Operational Implementation of EGNOS and LPV Approaches in Aviation in
Europe”. Proceedings of the 23rd International Technical Meeting of the Satellite
Division of The Institute of Navigation (ION GNSS 2010). Portland, OR, September 2010. P. 1440-1448.
11.
Bitter M., T. Feuerle, B. von Wulfen, M. Steen, P. Hecker.
2010. “Testbed for dual-constellation GBAS concepts”. Proceedings of
the IEEE/ION Position, Location and Navigation Symposium. Indian Wells, CA, USA, 2010. P. 680-687. DOI: 10.1109/PLANS.2010.5507220.
12.
Di Girolamo S., F. Luongo, M. Marinelli, A. Zin, L. Scaciga,
L. Rocco, L. Campa, L. Marradi. 2008. “Galileo Test User Segment design and
performances related to aeronautical safety of life applications”. Proceedings of the 2008 Tyrrhenian International Workshop on Digital
Communications - Enhanced Surveillance of Aircraft and Vehicles. Capri, 2008. P. 1-6. DOI: 10.1109/TIWDC.2008.4649024.
13.
Frisk G. 2000. “A ground based augmentation service for
gate-to-gate operations”. Proceedings of the IEEE 2000. Position Location
and Navigation Symposium (Cat. No.00CH37062). San Diego, CA, USA, 2000. P. 527-534. DOI: 10.1109/PLANS.2000.838349.
14.
Song J., C. Milner. 2023. “Assessment of Number of Critical
Satellites for Ground-Based Augmentation System Continuity Allocation to
Support Category II/III Precision Approaches”. Sensors 23: 8273. DOI: 10.3390/s23198273.
15.
NLR
Webiste. “Worlds first: Galileo’s first aerial fix of aircraft during flight”.
Available at: https://www.nlr.org/news/worlds-first-galileos-first-aerial-fix-of-aircraft-during-flight/.
16.
Hu T., G. Zhang, L. Zhong. 2023. “Software Design for
Airborne GNSS Air Service Performance Evaluation under Ionospheric
Scintillation”. Electronics 12: 3713. DOI: 10.3390/electronics12173713.
17.
Ilyin V., I. Kopylov, E. Kharin, V. Kopelovich, A. Yakushev,
P. Zhabin. 2022. “Flight Tests of Onboard SNS Equipment Characteristics During
Operation with Different Global Navigation Satellite Systems”. Proceedings of the 2022 29th Saint Petersburg International Conference
on Integrated Navigation Systems (ICINS). Saint Petersburg, Russian Federation, 2022. P. 1-5. DOI:
10.23919/ICINS51784.2022.9815371.
18.
Magalhãe
A., J. A. Gonçalves, L. Bastos. 2021. “Assessing Galileo Positioning Using a
Smartphone in an Airborne Platform”. WiP
Proceedings of the International Conference on Localization and GNSS (ICL-GNSS
2021). Tampere, Finland, June 1-3, 2021. P. 1-10.
19.
Gonçalves
J. A., A. Magalhãe, L. Bastos. 2021. “Galileo Performance Assessment for
Aerial Navigation”. WiP Proceedings of the International
Conference on Localization and GNSS (ICL-GNSS 2021). Tampere, Finland, June 1-3, 2021. P. 1-9.
20.
Bastos L., P. Buist, R. Cefalo, J. A. Goncalves, A. Ivan, A.
Magalhaes, A. Pandele, M. Porretta, A. Radutu, T. Sluga, P.
Snider. 2022. “Kinematic Galileo and GPS Performances in Aerial, Terrestrial,
and Maritime Environments”. Remote
Sensing 14: 3414. DOI: 10.3390/rs14143414.
21.
Elmezayen A., M. Karaim, H. Elghamrawy, A. Noureldin. 2023.
“Enhanced GNSS Reliability on High-Dynamic Platforms: A Comparative Study of
Multi-Frequency, Multi-Constellation Signals in Jamming Environments”. Sensors 23: 9552. DOI: 10.3390/s23239552.
22.
Muhammad B., E. Cianca, A. M. Salonico. 2014. “Multi GNSS Advanced
RAIM: An availability analysis”. Proceedings of
the 2014 IEEE Metrology for Aerospace
(MetroAeroSpace). Benevento, Italy, 2014. P. 28-33. DOI: 10.1109/MetroAeroSpace.2014.6865889.
23.
Oehler V., G.W. Hein, B. Eissfeller, B. Ott. 2000.
“GNSS-2/Galileo End-to-End Simulations for Aviation, Urban and Maritime
Applications”. Proceedings of the IAIN World Congress and the 56th Annual Meeting of
The Institute of Navigation (2000). San Diego, CA, June 2000. P. 461-468.
24.
Paternostro S., T. Moore, C. Hill, J. Atkin, H.P. Morvan.
2016. “Evaluation of Advanced Receiver Autonomous Integrity Monitoring
Performance on Predicted Aircraft Trajectories”. Proceedings of the IEEE/ION PLANS 2016. Savannah, GA, April 2016. P. 842-856.
25.
Joerger M., B. Pervan. 2014. “Solution separation and
Chi-Squared ARAIM for fault detection and exclusion”. Proceedings of
the 2014 IEEE/ION Position, Location and Navigation Symposium - PLANS 2014. Monterey, CA, USA, 2014. P. 294-307. DOI: 10.1109/PLANS.2014.6851388.
26.
Ober P.B., D. Harriman. 2006. “On the use of
Multiconstellation-RAIM for Aircraft Approaches”. Proceedings of the 19th International Technical Meeting of the Satellite
Division of The Institute of Navigation (ION GNSS 2006). Fort Worth, TX, September 2006. P.
2587-2596.
27.
Julien O., Jean-Luc I., Lionel R. 2011. “Investigation of
Galileo E1 OS/SoL Acquisition, Tracking and Data Demodulation Thresholds for
Civil Aviation”. Proceedings of the 24th International Technical Meeting of the Satellite
Division of The Institute of Navigation (ION GNSS 2011). Portland, OR, September 2011. P. 1264-1276.
28.
Novella G., Garcia-Pena A. J., C. Macabiau, A. Martineau, P.
Ladoux, P. Estival, O. Troubet-Lacoste. 2022. “GNSS Acquisition
Thresholds for Civil Aviation GNSS Receivers”. Proceedings of the 35th
International Technical Meeting of the Satellite Division of The Institute of
Navigation (ION GNSS+ 2022). Denver, Colorado, September 2022. P.
166-191. DOI: 10.33012/2022.18357.
29.
Blais A.
2014. „Feasibility of a Direct Sampling Dual-Frequency SDR Galileo
Receiver for Civil Aviation|”. PhD thesis. INP
Touluse.
30.
Garcia-Pena
A., O. Julien. 2016. “Data Integrity for GPS and Galileo Signals used by
Civil Aviation”. Proceedings of the 29th International Technical Meeting of the Satellite
Division of The Institute of Navigation (ION GNSS+ 2016). Portland, Oregon, September 2016. P.
2826-2838. DOI: 10.33012/2016.14572.
31.
Fyfe P., K. Davis, I. Jeng, C. Kelley, C. Mosley. 2002. “GPS
and Galileo - Interoperability for Civil Aviation Applications”. Proceedings of the 15th International Technical Meeting of the Satellite
Division of The Institute of Navigation (ION GPS 2002). Portland, OR, September 2002. P.
289-302.
32.
Bastide
F., B. Roturier, O. Julien, C. Macabiau, E. Rebeyrol, M. Raimondi, C. Ouzeau,
D. Kubrak. 2006. “Civil Aviation GALILEO E5 receivers architecture”. Proceedings of the 1st Workshop on
GALILEO Signals and Signal Processing. October 2006, Toulouse, France. P. 1-11.
33.
Schuster A.B., R. Jeans, E. Chatre, G. Alcouffe. 2003.
“Aviation Applications for Galileo”. Proceedings
of the 16th International Technical Meeting of the Satellite Division of The
Institute of Navigation (ION GPS/GNSS 2003). Portland, OR, September 2003. P. 849-856.
34.
Bastide F. 2004. “Galileo E5a/E5b and GPS L5 Acquisition Time
Statistical Characterization and Application to Civil Aviation”. Proceedings of the 17th International Technical Meeting of the Satellite
Division of The Institute of Navigation (ION GNSS 2004). Long Beach, CA, September 2004. P. 2623-2635.
35.
Garcia-Pena A., C. Macabiau, O. Julien, M. Mabilleau, P.
2020. “IGNSS Computation Models and Values for GPS and GALILEO L5/E5a Civil
Aviation Receivers”. Proceedings of the 33rd
International Technical Meeting of the Satellite Division of The Institute of
Navigation (ION GNSS+ 2020). September 2020. P. 206-218. DOI: 10.33012/2020.17571.
36.
De Angelis M., R. Fantacci, S. Menci, C. Rinaldi. 2005.
“Analysis of air traffic control systems interference impact on Galileo
aeronautics receivers”. Proceedings of the IEEE International Radar
Conference, 2005. Arlington, VA, USA, 2005. P. 585-595.
DOI: 10.1109/RADAR.2005.1435897.
37.
Cinar T., F. Ince. 2005. “Contribution of GALILEO to search
and rescue”. Proceedings of 2nd International Conference on Recent Advances in Space
Technologies, 2005. RAST 2005, Istanbul, Turkey, 2005. P. 254-259. DOI:
10.1109/RAST.2005.1512572.
38.
Alegre-Godoy R., I. Stojkovic. 2014. “Improving the
availability of the SAR/Galileo return link service via network coding”. Proceedings of the 2014 7th ESA Workshop on Satellite Navigation
Technologies and European Workshop on GNSS Signals and Signal Processing
(NAVITEC). Noordwijk, Netherlands, 2014. P. 1-6.
DOI: 10.1109/NAVITEC.2014.7045149.
39.
Causa
F., M. Asciolla, R. Opromolla,
P. Molina, A. Mennella, M. Nisi,
G. Fasano. 2022. “UAV-based LiDAR Mapping with Galileo-GPS PPP
Processing and Cooperative Navigation”. Proceedings
of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS). Dubrovnik, Croatia, 2022. P. 938-947.
DOI: 10.1109/ICUAS54217.2022.9836183.
40.
Haro P., C. Aguilera, G. Lucchi. 2023. “Required Navigation
Performances for Drone Flight Operations”. Engineering Proceedings 54: 51. DOI: 10.3390/ENC2023-15459.
41.
Damy S., L. Cucchi, A. Mennella, G. Luisi, M. Paonni, I.
Fernandez-Hernandez. 2023. “Increasing the Robustness of Drone Operations with
Galileo Open Service Navigation Message Authentication (OSNMA)”. Proceedings
of the 2023 International Conference on Localization and GNSS (ICL-GNSS). Castellón, Spain, 2023. P. 1-6. DOI: 10.1109/ICL-GNSS57829.2023.10148917.
42.
Buggiani V., J.C.Ú. Ortega, G. Silva, J. Rodríguez-Molina, D.
Vilca. 2023. “An Inexpensive Unmanned Aerial Vehicle-Based Tool for Mobile
Network Output Analysis and Visualization”. Sensors 23: 1285. DOI: 10.3390/s23031285.
43.
Fasano G., F. Causa, R. Opromolla, M. Asciolla, M. Nisi, L.
Pozzoli, M. Lisi, A. Mennella, G. Gagliarde, G. Luisi, P.
Molina, M. Blazquez, I. Colomina, P. Cabrera, G. Rodriguez, R. Poggi, L. Lisi, G.
Fagioli, R. Muscinelli. “AMPERE: exploiting Galileo for electrical asset
mapping in emerging countries”. Proceedings
of the 2021 IEEE 8th International Workshop on Metrology for AeroSpace
(MetroAeroSpace). Naples, Italy, 2021. P. 709-714. DOI:
10.1109/MetroAeroSpace51421.2021.9511736.
44.
Robustelli U., G. Pugliano. 2019. “Galileo Single Point
Positioning Assessment Including FOC Satellites in Eccentric Orbits”. Remote Sensing 11: 1555. DOI: 10.3390/rs11131555.
45.
DJI
Enterprise Webiste. “Matrice 300 RTK”. Available at:
https://enterprise.dji.com/matrice-300.
46.
RTKLIB
website. Available at: https://www.rtklib.com/.
47.
Emlid
Website. Available at: https://emlid.com/emlid-studio/.
48.
Takasu
T., “RTKLIB ver. 2.4.2 Manual, RTKLIB: An Open Source Program. Package for GNSS
Positioning”. Available online: http://www.rtklib.com/prog/manual_2.4.2.pdf.
49.
Kaniewski P., R. Gil, S.
Konatowski. 2016.
“Algorithms of position and velocity estimation in GPS receivers”. Annual of
Navigation 23: 53-68. DOI: 10.1515/aon-2016-0004.
50.
Grzegorzewski
M. 2005. “Navigating an aircraft by means of a position potential in three
dimensional space”. Annual of Navigation 9: 1-111.
51.
Topcon
Website. Available at:
https://mytopcon.topconpositioning.com/support/products/magnet-tools.
52.
Specht C., J. Pawelski, L. Smolarek, M. Specht,
P. Dabrowski. 2019.
“Assessment of the Positioning Accuracy of DGPS and EGNOS Systems in the Bay of
Gdansk using Maritime Dynamic Measurements”. Journal of Navigation
72(3): 575-587. DOI: 10.1017/S0373463318000838.
53.
Scilab
Website. Available at: https://www.scilab.org.
Received 08.01.2025; accepted in revised form 30.03.2025
![]()
Scientific Journal of Silesian
University of Technology. Series Transport is licensed under a Creative
Commons Attribution 4.0 International License