Article citation information:
Staniek, M. Detection of cracks in asphalt
pavement during road inspection processes. Scientific
Journal of Silesian University of Technology. Series Transport. 2017, 96,
175-184. ISSN:
0209-3324. DOI: https://doi.org/10.20858/sjsutst.2017.96.16.
Marcin STANIEK[1]
DETECTION OF CRACKS IN ASPHALT
PAVEMENT DURING ROAD INSPECTION PROCESSES
Summary.
Road inspection is one of key processes of a pavement management system, whose
function is to examine and describe the road infrastructure condition. When
thoroughly performed, it provides the information required to implement an
adequate road infrastructure maintenance policy and plan ad hoc repairs or
refurbishments. This article discusses a solution for automatic asphalt pavement
cracking detection, based on image-processing technology. This solution makes
it possible to identify different crack types, i.e., transverse, longitudinal,
alligator-type and technological cracks. The detection process is based on the
application of various methods, including statistical difference identification
for pre-assumed image analysis directions, i.e., in and opposite to the test
vehicle running direction. The purpose of the morphological and filtering
operations applied was to reduce the image noise level. The solution proposed
was verified using video material in the form of a sequence of images recorded
using the test vehicle.
Keywords:
microlinear asphalt pavement distresses; crack mapping; line detection; crack
pavement
1. INTRODUCTION
Every day around the world, there
are road accidents. Traffic participant faults, transport breakdowns and poor
road infrastructure contribute to their creation. It is most difficult to
eliminate the first mentioned causes [1, 2]. Appropriate diagnostics of the
means of transport (for example, by non-invasive methods [3, 4]) can reduce
their cause in road accidents. The last element is road infrastructure,
including the state of the roads.
Road pavement crack detection is one
of elements of the road inspection process. It comprises problems of crack
analysis [5, 6], crack classification [7], crack depth estimation [8, 9] and
crack sealing [10]. The most popular solutions used as asphalt pavement crack
detection tools are based on the analysis of dependent variables in the pixel
intensity function. A threshold value established by
the application of statistical measures of the image intensity function
determines whether pixels should be assigned to a crack or to its vicinity [11].
In the studies described
in [12, 13], the wavelet transform of an image was used to detect road pavement
cracks. A comprehensive analysis of multi-resolution was proposed, where the
determination of texture characteristic curves was based on the Haar,
Daubechies, Coiflet, ridgelet and curvelet transformations. A critical
assessment of multi-resolution analysis and statistical thresholding methods,
as well as edge detection and wavelet transforms, is provided in [14].
Machine learning-based
solutions for the detection of road pavement cracks are described in [15],
which reports on a study in which the graph cut segmentation technique [16, 17]
was applied to find crack and background regions in the image. For
classification purposes of cracks, specific characteristics were defined to describe
factors on which defects depended. The identified cracks were classified
according to individual sets: transverse cracking, longitudinal cracking, block
cracking or alligator-type cracking. The solution described in [18] is based on
a similar concept, the only major difference being that images are recorded
using vehicle windshield-mounted cameras. The sequence of images recorded shows
the road infrastructure, vehicles, pedestrians and buildings. Using simple
linear iterative clustering [19], the road pavement surface is extracted for
further calculations, while dependent variables of the intensity and texture
function are used to identify image descriptors. Analogically to the study
described in [15], characteristic curves describing the dependences
conditioning the occurrence of cracks were defined for the support vector
machine. Problems of crack detection have also been addressed in [20, 21, 22].
2. ASPHALT PAVEMENT CRACK DETECTION METHOD
The method proposed in this paper
for asphalt pavement crack detection is based on the analysis of differences
between dependent variables in the function of intensity of successive pixels
in an image line, with the mean dependent variable of the intensity function
calculated in the given image area. It takes into consideration the dependent
variable in the intensity function for the pixels, subject to analysis in the
detection process, such that specific objects, i.e., defects of another type
which do not belong to the pavement crack group, are cut off in the image. The determined threshold values make it possible to
unambiguously assign pixels of the image to the existing asphalt pavement
cracks. They are calculated for large image fragments, which increases the
probability of the adequate estimation of the threshold value in statistical
terms.
The proposed asphalt
pavement crack detection method comprises the following consecutive actions:
-
Road
image acquisition
-
Image
noise filtering
-
Image
breakdown into fragments
-
Determination
of mean dependent variables of the intensity function for preset image
fragments
-
Determination
of deviation values for a preset estimation window
-
Determination
of thresholding parameter levels
-
Identification
of pixels belonging to a crack group
-
Image
morphology operations
-
Segmentation
of image objects/crack identification
-
Creating
records of identified cracks
A sequence of asphalt pavement
images recorded by means of a CCD camera is used in the detection process. The
acquired image designated as I is
1,024 x 768 pixels in dimensions and features an 8 bit colour depth. The images are subject to low-pass filtering given by the
following formula:
![]() (1)
(1)
where:
p – cut-off threshold level estimated depending
on the illumination conditions during image acquisition
Once the filtering procedure is
completed, images are divided into fragments (Fig. 1) and the mean dependent
variable of the range intensity function is established. The proposed breakdown
results from the necessity to eliminate the non-uniformity of illumination, as
well as image distortions in the optoelectronic system which affect the
analysis of pixels and crack detection.
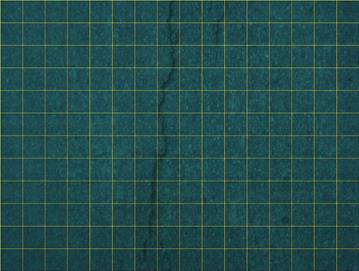
Fig. 1. Breakdown of a sample road
image into fragments
The assumed breakdown of image I into fragments of 64 x 64 pixels in
size constitutes a complete horizontal and vertical division of the image into
16 and 12 fragments, respectively. For the image
fragments subject to analysis, the mean dependent variable of the intensity
function is calculated according to the following formula:
![]() (2)
(2)
where G is the set of coordinates (i, j) of image I used to determine the mean dependent
variable of intensity function F with
indices (m, n), as given by the
following formula:
![]() (3)
(3)
The next step in the detection
method consists of determining the value of deviation D for the given estimation window M, which has been defined as the n set of successive pixels in the given line or column of image I. A graphical interpretation of
estimation window M is provided in
Fig. 2.

Fig. 2. Graphical interpretation of
estimation window M for the value of
deviation D
On account of the assumed crack
detection methods, the procedure for determining the value of deviation D for the given estimation window M is performed twice, independently for
all lines (4) and all columns (8) of image I
under analysis, i.e., in the direction of the running test vehicle and in
the opposite direction.
 (4)
(4)
where Mr
is the window for the estimation of deviation D in the dependent variables of the intensity function, given by a
set of coordinates (i’, j’), as
per Formula (5);
m is the horizontal index for the range of
the mean dependent variable of intensity function F, given by the following formula: ![]() ; and n
is the vertical index for the range of the mean dependent variable of intensity
function F, given by the following
formula:
; and n
is the vertical index for the range of the mean dependent variable of intensity
function F, given by the following
formula: ![]() .
.
![]() (5)
(5)
where pr
is the number of pixels analysed in a line to the left and to the right of the
base pixel with coordinates (i, j)
in image I.
The procedure for
determining the values of deviation Dc
for each preset estimation Mc
for all columns of image I under
analysis is conducted according to Formula (6):
 (6)
(6)
where Mc
is the window for the estimation of deviation Dc in the dependent variables of the intensity function,
given by a set of coordinates (i’, j’),
as per Formula (7),
![]() (7)
(7)
where pc
is the number of pixels analysed in a column above and below the base pixel
with coordinates (i, j) in image
I.
Fig. 3 presents an example of the
identification of pixels belonging to a specific group of asphalt pavement
cracks. It compares a graph of dependent variables in the intensity function
for image I in the given column (the
data of which are taken into consideration in the identification process), with
a graph of deviations Dr determined
for the pre-assumed estimation window of Mr. It additionally shows an image fraction with the analysed
line marked.
In the interests of the
automatic identification of cracks, for the initially determined values of
deviations Dr and Dc of all pixels in image I, two criteria were defined to allow
for the assignment of pixels depending on the analysis type: in lines (8) or in
columns (9).
 (8)
(8)
 (9)
(9)
where t1c, t2c
are the threshold values of column c analysed
in image I, chosen with reference to
a linear regression model developed by the application of the least-squares
method; and t1r, t2r
are the threshold values of line r analysed
in image I, chosen with reference to
a linear regression model developed by the application of the least-squares
method.
If one of the foregoing criteria
points at the analysed pixel meets with coordinates (i, j) in image I, then
it is a road pavement crack; otherwise, it is regarded as the background, i.e.,
the road image. In this way, a new road image of I’ is created with the locations of
cracks marked.
To enable the successful
identification and recording of cracks in image I’, one should perform a typical morphological operation, which
consists of closing objects. This constitutes a combination of the operations
of dilation and erosion, with the target object being 3 x 3 pixels in size [23].
What follows is an object segmentation procedure conducted with the application
of the region growing method [24].
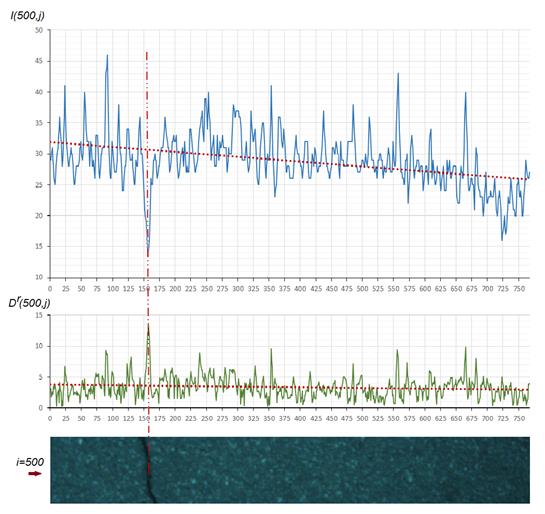
Fig. 3. Graphical
representation of the crack pixels identification method
3. VERIFICATION OF THE PROPOSED SOLUTION
The asphalt pavement
crack detection method was verified using test material, recorded as a sequence
of images, which was taken by means of a stereo vision set installed on the
test vehicle. The studies were performed on local roads whose overall test road
section length came to about 1.6 km. Cracks were identified and recorded
for 1,281 images in video sequences, which corresponded to about 0.983 km of
the test road section. The cracks identified as a result of
the measurements were of the longitudinal, transverse and alligator types.
No technological cracks in the road pavement were found in the sections subject
to tests. Fig. 3 shows selected cracks identified in the asphalt pavement being
examined.
|
|
|
a) Longitudinal-type
crack |
|
|
|
|
|
b) Alligator-type
crack |
|
|
|
|
|
c)Transverse-type
crack |
|
|
|
|
|
d)Alligator-type
crack |
|

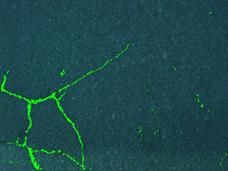

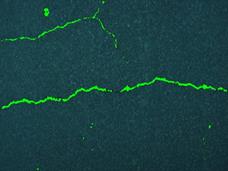

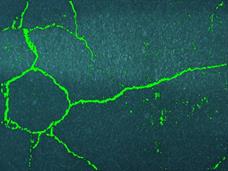
Fig. 4. Examples of identified
asphalt pavement cracks
4. CONCLUSION
The paper provides a discussion
concerning an automatic method of asphalt pavement crack detection, based on
the application of image-processing technologies and the statistical analysis
of the image intensity function. The studies addressed in the article provide
grounds for an assumption that, once it has been implemented, the method in
question enables crack detection at the level of 92% of all existing cracks
identified by manual visual inspection (i.e., by an expert conducting road
inspections). The solution assumed for this application makes it possible to
identify longitudinal, transverse and alligator-type cracks. Meanwhile, owing
to the segmentation operation, one can perform crack surface dimensioning and
establish both the type and the scope of the necessary repairs.
The follow-up research endeavours
involved in extending the detection method, as proposed in this paper, will
cover the identification of cracks where chipping of the asphalt pavement grain
can be observed. Further studies will also be undertaken to devise a method for
the detection of patches and potholes, with the aim of developing a
comprehensive tool for the identification of surface defects on asphalt road
pavements.
References
1.
Czech Piotr. 2017. “Physically disabled pedestrians -
road users in terms of road accidents.” In: E. Macioszek, G. Sierpiński, ed.,
Contemporary challenges of transport systems and traffic engineering. Lecture Notes in Network Systems, Vol.
2: 157-165. Springer. ISSN: 2367-3370. DOI:
https://doi.org/10.1007/978-3-319-43985-3_14.
2.
Czech Piotr. 2017. “Underage pedestrian road users in
terms of road accidents.” In: G. Sierpiński, ed., Intelligent
Transport Systems and Travel Behaviour.
Advances in Intelligent Systems and Computing, Vol. 505: 75-85. Springer.
ISSN: 2194-5357. DOI: https://doi.org/10.1007/978-3-319-43991-4_4.
3.
Czech Piotr. 2012.
“Diagnosis of industrial gearboxes condition by vibration and time-frequency,
scale-frequency, frequency-frequency analysis.” Metalurgija 51(4): 521-524. ISSN: 0543-5846.
4.
Madej Henryk,
Czech Piotr. 2010. “Discrete wavelet transform and probabilistic neural network
in IC engine fault diagnosis.” Eksploatacja
i Niezawodnosc – Maintenance and Reliability 4(48): 47-54. ISSN 1507-2711.
5.
Wang
Kelvin C., Weiguo Gong. 2005. “Real-time automated survey system of pavement
cracking in parallel environment.” Journal of Infrastructure Systems
11(3): 154-64. DOI: http://doi.org/10.1061/ASCE1076-0342200511:3154.
6.
Yaxiong
Huang, Bugao Xu. 2006. “Automatic inspection of pavement cracking distress.” Journal
of Electronic Imaging 15(1): 013017. DOI: http://doi.org/10.1117/1.2177650.
7.
Yukin
Sun, Ezzatollah Salari, Ellie Chou. 2009. “Automated pavement distress
detection using advanced image processing techniques.” In: Proceedings of
2009 IEEE International Conference on Electro/Information Technology, EIT 2009:
373-77. DOI: http://doi.org/10.1109/EIT.2009.5189645.
8.
Saha Arpita, Bhupendra Singh, Subhadip Biswas. 2017. “Effect of
nano-materials on asphalt concrete mixes; a case study.” European Transport/Transporti Europei
65: 1-12. ISSN 1825-3997.
9.
Saumya
Amarasiri, Manjriker Gunaratne, Sudeep Sarkar. 2010. “Modeling of crack depths in digital
images of concrete pavements using optical reflection properties.” Journal
of Transportation Engineering 136(6): 489-99.
DOI: http://doi.org/10.1061/(ASCE)TE.1943-5436.0000095.
10.
Haas
Carl. 1996. “Evolution of an automated crack sealer: a study in construction
technology development.” Automation in Construction 4(4): 293-305.
DOI: http://doi.org/10.1016/0926-5805(95)00010-0.
11.
Kim
Young S., Hyun S. Yoo, Jeong H. Lee, Seung W. Han. 2009. “Chronological
development history of X-Y table based pavement crack sealers and research
findings for practical use in the field.” Automation in Construction
18(5): 513-524. DOI: http://doi.org/10.1016/j.autcon.2009.02.007.
12.
Nejad
Moghadas, Fereidoon, Hamzeh Zakeri. 2011. “A comparison of multi-resolution
methods for detection and isolation of pavement distress.” Expert Systems
with Applications 38(3): 2857-2872. DOI: http://doi.org/10.1016/j.eswa.2010.08.079.
13.
Starck
Jean-Luc, Fionn Murtagh, Emmanuel J. Candès, David L. Donoho. 2003.
“Gray and color image contrast enhancement by the curvelet transform.” IEEE
Transactions on Image Processing 12(6): 706-717. DOI: http://doi.org/10.1109/TIP.2003.813140.
14.
Tsai
Yi-Chang, Kaul Vivek, Russell M Mersereau. 2010. “Critical assessment of
pavement distress segmentation methods.” Journal of Transportation
Engineering 136(1): 11-19. DOI:
http://doi.org/10.1061/(ASCE)TE.1943-5436.0000051.
15.
Moussa
Ghada, Hussain Khaled. 2011. “A new technique for automatic detection and
parameters estimation of pavement crack.” In: Fourth International
Multi-conference on Engineering Technology Innovation, IMETI. DOI:
http://doi.org/10.13140/2.1.3191.2001.
16.
Boykov
Yuri Y., Marie-Pierre Jolly. 2001. “Interactive graph cuts for optimal boundary
& region segmentation of objects in ND images.” In: Proceedings Eighth
IEEE International Conference on Computer Vision. ICCV 20011:105-112.
DOI: http://doi.org/10.1109/ICCV.2001.937505.
17.
Yin
Li, Jian Sun, Chi-Keung Tang, Heung-Yeung Shum. 2004. “Lazy snapping.” ACM
Transactions on Graphics 23(3): 303-308.
DOI: http://doi.org/10.1145/1015706.1015719.
18.
Achanta
Radhakrishna, Appu Shaji, Kevin Smith, Aurelien Lucchi, Pascal Fua, Sabine
Susstrunk 2010. “SLIC superpixels.” EPFL Technical Report 149300.
DOI: http://doi.org/10.1109/TPAMI.2012.120.
19.
Varadharajan
Srivatsan, Jose Sobhagya, Sharma Karan, Lars Wander, Christoph Mertz. 2014.
“Vision for road inspection.” In: 2014 IEEE Winter Conference on
Applications of Computer Vision: 115-122. DOI:
http://doi.org/10.1109/WACV.2014.6836111.
20.
Žuraulis
Vidas, Loreta Levulytė, Edgar Sokolovskij. 2014. “The impact of road
roughness on the duration of contact between a vehicle wheel and road surface.”
Transport 29(4): 431-439. DOI:
http://doi.org/10.3846/16484142.2014.984330.
21.
Byrne
Matthew, Tony Parry, Ricardo Isola, Andrew Dawson. 2013. “Identifying road
defect information from smartphones.” Road and Transport Research 22(1):
39-50.
22.
Kodippily
Sachi, Irina Holleran, Erik Glynn. 2016. “Characterising bitumen binders for
pavements in the Auckland region.” Road & Transport Research: A Journal of Australian and
New Zealand Research and Practice 25(4):
27-38. ISSN: 1037-5783.
23.
Cyganek,
Boguslaw, J. Paul Siebert. 2009. An Introduction to 3D Computer Vision Techniques and Algorithms.
Chichester, UK: John Wiley & Sons.
DOI: http://doi.org/10.1002/9780470699720.
24.
Bowyer,
Kevin, Narendra Ahuja. 1996. Advances in Image Understanding: A Festschrift
for Azriel Rosenfeld. Los Alamitos, USA: Wiley-IEEE Computer Society Press.
ISBN: 978-0-8186-7644-4.
Received 01.05.2017; accepted in revised form 25.07.2017
![]()
Scientific Journal of Silesian
University of Technology. Series Transport is licensed under a Creative
Commons Attribution 4.0 International License